How to make the robot dance
How to do the robot
Learn how to dance like a robot in this video tutorial! Robot dancing is really all about dime stops from popping dance style. In this video you will learn how to dance the robot easily with foundational popping concepts.
Want more? Get the full Course:
The Ultimate Popping Dance Course (Beginner to Advanced)
Learn how to dance popping and locking with step by step video lessons. You will learn hits/popping, waving, robotics, gliding, vibrating, slow motion effects and more. Become the freestyler you always wanted to be and impress your friends with your dance moves. Includes 3+ hours of video lessons. You can download it instantly or stream it online here.
Learn more & Buy it here (Click here)
[Transcript]
If we go to one of the purest forms and definitions of popping, it is actually to act or imitate as a robot. Robotics is all about dime stops. So dime stops is another huge fundamental dance style of popping. And it is the ability to freeze at a point in time.
Now technically speaking, you don’t even really have to hit to do dime stops. It’s more of just about the freeze. You definitely see a lot of poppers do a miniature hip when they dime stop.
Dime stop is definitely used a lot in robotics and I think it’s a great tool to use to develop patience when you dance. Starting out, it’s really easy to get caught in, “I got to do this. I got to go over here and do that.” But dime stops force you to freeze. So practicing dime stops can develop patience which is an awesome thing to have starting out.
So dime stops are I think a really easy move you can do on the first try. It’s just about freezing. So I’m going to give you a pattern to follow. Start with the left and the right arm to match it. And I’m just going to pick four corners. So I’m going to go left, down, down right, right. Pop.
Pop.
Now, I want to add a little bit more. I’m going to start using my heels to turn. Heels. Head.
Robotics is actually I think one of my favorite dance styles. I found myself roboting throughout the whole day. Roboting is definitely something that you can take your natural day-to-day movements and turn that into robotic style kind of dime stops.
So for example, let’s say I’m at dinner table. That’s the way I’m going to sit down. I put my arms out, set my plate right here, instead of just reaching out to get my fork and grab, I can go. So really, it’s just about using a regular way of doing things and thinking like a robot and using dime stops to kind of beat your communication for interpreting that as a dance.
I want you to think of a natural thing you do every day whether it’s brushing teeth or [0:02:26] [Indiscernible] and interpret that right now as a robot. If you were a robot, how would blank? OK? Fill that spot in. And we’ll catch you guys again.
[End of transcript]
More Hip hop dance videos
How to Make a Humanoid Robot Dance
As Verne understood, the U. S. Civil War (during which 60,000 amputations were performed) inaugurated the modern prosthetics era in the United States, thanks to federal funding and a wave of design patents filed by entrepreneurial prosthetists. The two World Wars solidified the for-profit prosthetics industry in both the United States and Western Europe, and the ongoing War on Terror helped catapult it into a US $6 billion dollar industry across the globe. This recent investment is not, however, a result of a disproportionately large number of amputations in military conflict: Around 1,500 U.S. soldiers and 300 British soldiers lost limbs in Iraq and Afghanistan. Limb loss in the general population dwarfs those figures. In the United States alone, more than 2 million people live with limb loss, with 185,000 people receiving amputations every year. A much smaller subset—between 1,500 to 4,500 children each year—are born with limb differences or absences, myself included.
S. Civil War (during which 60,000 amputations were performed) inaugurated the modern prosthetics era in the United States, thanks to federal funding and a wave of design patents filed by entrepreneurial prosthetists. The two World Wars solidified the for-profit prosthetics industry in both the United States and Western Europe, and the ongoing War on Terror helped catapult it into a US $6 billion dollar industry across the globe. This recent investment is not, however, a result of a disproportionately large number of amputations in military conflict: Around 1,500 U.S. soldiers and 300 British soldiers lost limbs in Iraq and Afghanistan. Limb loss in the general population dwarfs those figures. In the United States alone, more than 2 million people live with limb loss, with 185,000 people receiving amputations every year. A much smaller subset—between 1,500 to 4,500 children each year—are born with limb differences or absences, myself included.
Today, the people who design prostheses tend to be well-intentioned engineers rather than amputees themselves. The fleshy stumps of the world act as repositories for these designers’ dreams of a high-tech, superhuman future. I know this because throughout my life I have been fitted with some of the most cutting-edge prosthetic devices on the market. After being born missing my left forearm, I was one of the first cohorts of infants in the United States to be fitted with a myoelectric prosthetic hand, an electronic device controlled by the wearer’s muscles tensing against sensors inside the prosthetic socket. Since then, I have donned a variety of prosthetic hands, each of them striving toward perfect fidelity of the human hand—sometimes at a cost of aesthetics, sometimes a cost of functionality, but always designed to mimic and replace what was missing.
The fleshy stumps of the world act as repositories for these designers’ dreams of a high-tech, superhuman future. I know this because throughout my life I have been fitted with some of the most cutting-edge prosthetic devices on the market. After being born missing my left forearm, I was one of the first cohorts of infants in the United States to be fitted with a myoelectric prosthetic hand, an electronic device controlled by the wearer’s muscles tensing against sensors inside the prosthetic socket. Since then, I have donned a variety of prosthetic hands, each of them striving toward perfect fidelity of the human hand—sometimes at a cost of aesthetics, sometimes a cost of functionality, but always designed to mimic and replace what was missing.
In my lifetime, myoelectric hands have evolved from clawlike constructs to multigrip, programmable, anatomically accurate facsimiles of the human hand, most costing tens of thousands of dollars. Reporters can’t get enough of these sophisticated, multigrasping “bionic” hands with lifelike silicone skins and organic movements, the unspoken promise being that disability will soon vanish and any lost limb or organ will be replaced with an equally capable replica. Prosthetic-hand innovation is treated like a high-stakes competition to see what is technologically possible. Tyler Hayes, CEO of the prosthetics startup Atom Limbs, put it this way in a WeFunder video that helped raise $7.2 million from investors: “Every moonshot in history has started with a fair amount of crazy in it, from electricity to space travel, and Atom Limbs is no different.”
Prosthetic-hand innovation is treated like a high-stakes competition to see what is technologically possible. Tyler Hayes, CEO of the prosthetics startup Atom Limbs, put it this way in a WeFunder video that helped raise $7.2 million from investors: “Every moonshot in history has started with a fair amount of crazy in it, from electricity to space travel, and Atom Limbs is no different.”
We are caught in a bionic-hand arms race. But are we making real progress? It’s time to ask who prostheses are really for, and what we hope they will actually accomplish. Each new multigrasping bionic hand tends to be more sophisticated but also more expensive than the last and less likely to be covered (even in part) by insurance. And as recent research concludes, much simpler and far less expensive prosthetic devices can perform many tasks equally well, and the fancy bionic hands, despite all of their electronic options, are rarely used for grasping.
Activity arms, such as this one manufactured by prosthetics firm Arm Dynamics, are less expensive and more durable than bionic prostheses. The attachment from prosthetic-device company Texas Assistive Devices rated for very heavy weights, allowing the author to perform exercises that would be risky or impossible with her much more expensive bebionic arm.Gabriela Hasbun; Makeup: Maria Nguyen for MAC cosmetics; Hair: Joan Laqui for Living Proof
Function or Form
In recent decades, the overwhelming focus of research into and development of new artificial hands has been on perfecting different types of grasps. Many of the most expensive hands on the market differentiate themselves by the number and variety of selectable prehensile grips. My own media darling of a hand, the bebionic from Ottobock, which I received in 2018, has a fist-shaped power grip, pinching grips, and one very specific mode with thumb on top of index finger for politely handing over a credit card. My 21st-century myoelectric hand seemed remarkable—until I tried using it for some routine tasks, where it proved to be more cumbersome and time consuming than if I had simply left it on the couch. I couldn’t use it to pull a door shut, for example, a task I can do with my stump. And without the extremely expensive addition of a powered wrist, I couldn’t pour oatmeal from a pot into a bowl. Performing tasks the cool bionic way, even though it mimicked having two hands, wasn’t obviously better than doing things my way, sometimes with the help of my legs and feet.
My 21st-century myoelectric hand seemed remarkable—until I tried using it for some routine tasks, where it proved to be more cumbersome and time consuming than if I had simply left it on the couch. I couldn’t use it to pull a door shut, for example, a task I can do with my stump. And without the extremely expensive addition of a powered wrist, I couldn’t pour oatmeal from a pot into a bowl. Performing tasks the cool bionic way, even though it mimicked having two hands, wasn’t obviously better than doing things my way, sometimes with the help of my legs and feet.
When I first spoke with Ad Spiers, lecturer in robotics and machine learning at Imperial College London, it was late at night in his office, but he was still animated about robotic hands—the current focus of his research. Spiers says the anthropomorphic robotic hand is inescapable, from the reality of today’s prosthetics to the fantasy of sci-fi and anime. “In one of my first lectures here, I showed clips of movies and cartoons and how cool filmmakers make robot hands look,” Spiers says. “In the anime Gundam, there are so many close-ups of gigantic robot hands grabbing things like massive guns. But why does it need to be a human hand? Why doesn’t the robot just have a gun for a hand?”
“In the anime Gundam, there are so many close-ups of gigantic robot hands grabbing things like massive guns. But why does it need to be a human hand? Why doesn’t the robot just have a gun for a hand?”
It’s time to ask who prostheses are really for, and what we hope they will actually accomplish.
Spiers believes that prosthetic developers are too caught up in form over function. But he has talked to enough of them to know they don’t share his point of view: “I get the feeling that people love the idea of humans being great, and that hands are what make humans quite unique.” Nearly every university robotics department Spiers visits has an anthropomorphic robot hand in development. “This is what the future looks like,” he says, and he sounds a little exasperated. “But there are often better ways.”
The vast majority of people who use a prosthetic limb are unilateral amputees—people with amputations that affect only one side of the body—and they virtually always use their dominant “fleshy” hand for delicate tasks such as picking up a cup. Both unilateral and bilateral amputees also get help from their torsos, their feet, and other objects in their environment; rarely are tasks performed by a prosthesis alone. And yet, the common clinical evaluations to determine the success of a prosthetic are based on using only the prosthetic, without the help of other body parts. Such evaluations seem designed to demonstrate what the prosthetic hand can do rather than to determine how useful it actually is in the daily life of its user. Disabled people are still not the arbiters of prosthetic standards; we are still not at the heart of design.
Both unilateral and bilateral amputees also get help from their torsos, their feet, and other objects in their environment; rarely are tasks performed by a prosthesis alone. And yet, the common clinical evaluations to determine the success of a prosthetic are based on using only the prosthetic, without the help of other body parts. Such evaluations seem designed to demonstrate what the prosthetic hand can do rather than to determine how useful it actually is in the daily life of its user. Disabled people are still not the arbiters of prosthetic standards; we are still not at the heart of design.
The Hosmer Hook [left], originally designed in 1920, is the terminal device on a body-powered design that is still used today. A hammer attachment [right] may be more effective than a gripping attachment when hammering nails into wood.Left: John Prieto/The Denver Post/Getty Images; Right: Hulton-Deutsch Collection/Corbis/Getty Images
Prosthetics in the Real World
To find out how prosthetic users live with their devices, Spiers led a study that used cameras worn on participants’ heads to record the daily actions of eight people with unilateral amputations or congenital limb differences. The study, published last year in IEEE Transactions on Medical Robotics and Bionics, included several varieties of myoelectric hands as well as body-powered systems, which use movements of the shoulder, chest, and upper arm transferred through a cable to mechanically operate a gripper at the end of a prosthesis. The research was conducted while Spiers was a research scientist at Yale University’s GRAB Lab, headed by Aaron Dollar. In addition to Dollar, he worked closely with grad student Jillian Cochran, who coauthored the study.
The study, published last year in IEEE Transactions on Medical Robotics and Bionics, included several varieties of myoelectric hands as well as body-powered systems, which use movements of the shoulder, chest, and upper arm transferred through a cable to mechanically operate a gripper at the end of a prosthesis. The research was conducted while Spiers was a research scientist at Yale University’s GRAB Lab, headed by Aaron Dollar. In addition to Dollar, he worked closely with grad student Jillian Cochran, who coauthored the study.
Watching raw footage from the study, I felt both sadness and camaraderie with the anonymous prosthesis users. The clips show the clumsiness, miscalculations, and accidental drops that are familiar to even very experienced prosthetic-hand users. Often, the prosthesis simply helps brace an object against the body to be handled by the other hand. Also apparent was how much time people spent preparing their myoelectric prostheses to carry out a task—it frequently took several extra seconds to manually or electronically rotate the wrists of their devices, line up the object to grab it just right, and work out the grip approach. The participant who hung a bottle of disinfectant spray on their “hook” hand while wiping down a kitchen counter seemed to be the one who had it all figured out.
The participant who hung a bottle of disinfectant spray on their “hook” hand while wiping down a kitchen counter seemed to be the one who had it all figured out.
In the study, prosthetic devices were used on average for only 19 percent of all recorded manipulations. In general, prostheses were employed in mostly nonprehensile actions, with the other, “intact” hand doing most of the grasping. The study highlighted big differences in usage between those with nonelectric, body-powered prosthetics and those with myoelectric prosthetics. For body-powered prosthetic users whose amputation was below the elbow, nearly 80 percent of prosthesis usage was nongrasping movement—pushing, pressing, pulling, hanging, and stabilizing. For myoelectric users, the device was used for grasping just 40 percent of the time.
More tellingly, body-powered users with nonelectric grippers or split hooks spent significantly less time performing tasks than did users with more complex prosthetic devices. Spiers and his team noted the fluidity and speed with which the former went about doing tasks in their homes. They were able to use their artificial hands almost instantaneously and even experience direct haptic feedback through the cable that drives such systems. The research also revealed little difference in use between myoelectric single-grasp devices and fancier myoelectric multiarticulated, multigrasp hands—except that users tended to avoid hanging objects from their multigrasp hands, seemingly out of fear of breaking them.
Spiers and his team noted the fluidity and speed with which the former went about doing tasks in their homes. They were able to use their artificial hands almost instantaneously and even experience direct haptic feedback through the cable that drives such systems. The research also revealed little difference in use between myoelectric single-grasp devices and fancier myoelectric multiarticulated, multigrasp hands—except that users tended to avoid hanging objects from their multigrasp hands, seemingly out of fear of breaking them.
“We got the feeling that people with multigrasp myoelectric hands were quite tentative about their use,” says Spiers. It’s no wonder, since most myoelectric hands are priced over $20,000, are rarely approved by insurance, require frequent professional support to change grip patterns and other settings, and have costly and protracted repair processes. As prosthetic technologies become more complex and proprietary, the long-term serviceability is an increasing concern. Ideally, the device should be easily fixable by the user. And yet some prosthetic startups are pitching a subscription model, in which users continue to pay for access to repairs and support.
Ideally, the device should be easily fixable by the user. And yet some prosthetic startups are pitching a subscription model, in which users continue to pay for access to repairs and support.
Despite the conclusions of his study, Spiers says the vast majority of prosthetics R&D remains focused on refining the grasping modes of expensive, high-tech bionic hands. Even beyond prosthetics, he says, manipulation studies in nonhuman primate research and robotics are overwhelmingly concerned with grasping: “Anything that isn’t grasping is just thrown away.”
TRS makes a wide variety of body-powered prosthetic attachments for different hobbies and sports. Each attachment is specialized for a particular task, and they can be easily swapped for a variety of activities. Fillauer TRS
Grasping at History
If we’ve decided that what makes us human is our hands, and what makes the hand unique is its ability to grasp, then the only prosthetic blueprint we have is the one attached to most people’s wrists. Yet the pursuit of the ultimate five-digit grasp isn’t necessarily the logical next step. In fact, history suggests that people haven’t always been fixated on perfectly re-creating the human hand.
Yet the pursuit of the ultimate five-digit grasp isn’t necessarily the logical next step. In fact, history suggests that people haven’t always been fixated on perfectly re-creating the human hand.
As recounted in the 2001 essay collection Writing on Hands: Memory and Knowledge in Early Modern Europe, ideas about the hand evolved over the centuries. “The soul is like the hand; for the hand is the instrument of instruments,” Aristotle wrote in De Anima. He reasoned that humanity was deliberately endowed with the agile and prehensile hand because only our uniquely intelligent brains could make use of it—not as a mere utensil but a tool for apprehensio, or “grasping,” the world, literally and figuratively.
More than 1,000 years later, Aristotle’s ideas resonated with artists and thinkers of the Renaissance. For Leonardo da Vinci, the hand was the brain’s mediator with the world, and he went to exceptional lengths in his dissections and illustrations of the human hand to understand its principal components. His meticulous studies of the tendons and muscles of the forearm and hand led him to conclude that “although human ingenuity makes various inventions…it will never discover inventions more beautiful, more fitting or more direct than nature, because in her inventions nothing is lacking and nothing is superfluous.”
His meticulous studies of the tendons and muscles of the forearm and hand led him to conclude that “although human ingenuity makes various inventions…it will never discover inventions more beautiful, more fitting or more direct than nature, because in her inventions nothing is lacking and nothing is superfluous.”
Da Vinci’s illustrations precipitated a wave of interest in human anatomy. Yet for all of the studious rendering of the human hand by European masters, the hand was regarded more as an inspiration than as an object to be replicated by mere mortals. In fact, it was widely accepted that the intricacies of the human hand evidenced divine design. No machine, declared the Christian philosopher William Paley, is “more artificial, or more evidently so” than the flexors of the hand, suggesting deliberate design by God.
Performing tasks the cool bionic way, even though it mimicked having two hands, wasn’t obviously better than doing things my way, sometimes with the help of my legs and feet.
By the mid-1700s, with the Industrial Revolution in the global north, a more mechanistic view of the world began to emerge, and the line between living things and machines began to blur. In her 2003 article “ Eighteenth-Century Wetware,” Jessica Riskin, professor of history at Stanford University, writes, “The period between the 1730s and the 1790s was one of simulation, in which mechanicians tried earnestly to collapse the gap between animate and artificial machinery.” This period saw significant changes in the design of prosthetic limbs. While mechanical prostheses of the 16th century were weighed down with iron and springs, a 1732 body-powered prosthesis used a pulley system to flex a hand made of lightweight copper. By the late 18th century, metal was being replaced with leather, parchment, and cork—softer materials that mimicked the stuff of life.
The techno-optimism of the early 20th century brought about another change in prosthetic design, says Wolf Schweitzer, a forensic pathologist at the Zurich Institute of Forensic Medicine and an amputee. He owns a wide variety of contemporary prosthetic arms and has the necessary experience to test them. He notes that anatomically correct prosthetic hands have been carved and forged for the better part of 2,000 years. And yet, he says, the 20th century’s body-powered split hook is “more modern,” its design more willing to break the mold of the human hand.
He owns a wide variety of contemporary prosthetic arms and has the necessary experience to test them. He notes that anatomically correct prosthetic hands have been carved and forged for the better part of 2,000 years. And yet, he says, the 20th century’s body-powered split hook is “more modern,” its design more willing to break the mold of the human hand.
“The body powered arm—in terms of its symbolism—(still) expresses the man-machine symbolism of an industrial society of the 1920s,” writes Schweitzer in his prosthetic arm blog, “when man was to function as clockwork cogwheel on production lines or in agriculture.” In the original 1920s design of the Hosmer Hook, a loop inside the hook was placed just for tying shoes and another just for holding cigarettes. Those designs, Ad Spiers told me, were “incredibly functional, function over form. All pieces served a specific purpose.”
Schweitzer believes that as the need for manual labor decreased over the 20th century, prostheses that were high-functioning but not naturalistic were eclipsed by a new high-tech vision of the future: “bionic” hands. In 2006, the U.S. Defense Advanced Research Projects Agency launched Revolutionizing Prosthetics, a research initiative to develop the next generation of prosthetic arms with “near-natural” control. The $100 million program produced two multi-articulating prosthetic arms (one for research and another that costs over $50,000). More importantly, it influenced the creation of other similar prosthetics, establishing the bionic hand—as the military imagined it—as the holy grail in prosthetics. Today, the multigrasp bionic hand is hegemonic, a symbol of cyborg wholeness.
In 2006, the U.S. Defense Advanced Research Projects Agency launched Revolutionizing Prosthetics, a research initiative to develop the next generation of prosthetic arms with “near-natural” control. The $100 million program produced two multi-articulating prosthetic arms (one for research and another that costs over $50,000). More importantly, it influenced the creation of other similar prosthetics, establishing the bionic hand—as the military imagined it—as the holy grail in prosthetics. Today, the multigrasp bionic hand is hegemonic, a symbol of cyborg wholeness.
And yet some prosthetic developers are pursuing a different vision. TRS, based in Boulder, Colo., is one of the few manufacturers of activity-specific prosthetic attachments, which are often more durable and more financially accessible than robotic prosthetics. These plastic and silicone attachments, which include a squishy mushroom-shaped device for push-ups, a ratcheting clamp for lifting heavy weights, and a concave fin for swimming, have helped me experience the greatest functionality I have ever gotten out of a prosthetic arm.
Such low-tech activity prostheses and body-powered prostheses perform astonishingly well, for a tiny fraction of the cost of bionic hands. They don’t look or act like human hands, and they function all the better for it. According to Schweitzer, body-powered prostheses are regularly dismissed by engineers as “arcane” or derisively called “Captain Hook.” Future bionic shoulders and elbows may make a huge difference in the lives of people missing a limb up to their shoulder, assuming those devices can be made robust and affordable. But for Schweitzer and a large percentage of users dissatisfied with their myoelectric prosthesis, the prosthetic industry has yet to provide anything fundamentally better or cheaper than body-powered prostheses.
The Breakthroughs We Want
Bionic hands seek to make disabled people “whole,” to have us participate in a world that is culturally two-handed. But it’s more important that we get to live the lives we want, with access to the tools we need, than it is to make us look like everyone else. While many limb-different people have used bionic hands to interact with the world and express themselves, the centuries-long effort to perfect the bionic hand rarely centers on our lived experiences and what we want to do in our lives.
While many limb-different people have used bionic hands to interact with the world and express themselves, the centuries-long effort to perfect the bionic hand rarely centers on our lived experiences and what we want to do in our lives.
We’ve been promised a breakthrough in prosthetic technology for the better part of 100 years now. I’m reminded of the scientific excitement around lab-grown meat, which seems simultaneously like an explosive shift and a sign of intellectual capitulation, in which political and cultural change is passed over in favor of a technological fix. With the cast of characters in the world of prosthetics—doctors, insurance companies, engineers, prosthetists, and the military—playing the same roles they have for decades, it’s nearly impossible to produce something truly revolutionary.
In the meantime, this metaphorical race to the moon is a mission that has forgotten its original concern: helping disabled people acquire and use the tools they want. There are inexpensive, accessible, low-tech prosthetics that are available right now and that need investments in innovation to further bring down costs and improve functionality. And in the United States at least, there is a broken insurance system that needs fixing. Releasing ourselves from the bionic-hand arms race can open up the possibilities of more functional designs that are more useful and affordable, and might help us bring our prosthetic aspirations back down to earth.
There are inexpensive, accessible, low-tech prosthetics that are available right now and that need investments in innovation to further bring down costs and improve functionality. And in the United States at least, there is a broken insurance system that needs fixing. Releasing ourselves from the bionic-hand arms race can open up the possibilities of more functional designs that are more useful and affordable, and might help us bring our prosthetic aspirations back down to earth.
This article appears in the October 2022 print issue.
How to teach a robot to dance? Answer using the example of Boston Dynamics
Society
October 16, 2018, 20:00
YouTube
Read 360tv in
Boston Dynamics engineers taught Spot Mini, a four-legged robot, to dance. As numerous fans of robops noted, he moves better than many people.
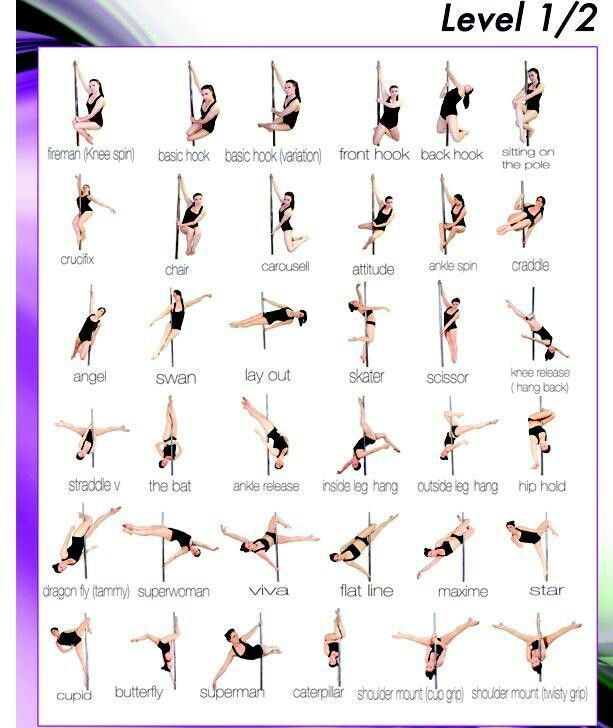
To Bruno Mars' Uptown Funk, the robot dog dances gracefully, borrowing moves from twerk, pole dancing and even Michael Jackson's famous moonwalk.
In 2019, Boston Dynamics intends to open Spot Mini sales to everyone. The smart device already knows how to open doors, help its fellows overcome obstacles, and even resist a person a little.
Spot Mini will be Boston Dynamics' first commercial model. In addition to it, the company is developing, for example, the Atlas humanoid robot. Recently, this device has learned to parkour.
Initially, Boston Dynamics planned to produce robots for the US Army. It was assumed that the units would carry cargo over impassable terrain. But in 2015, the Marine Corps command abandoned the project.
In the middle of last year, the company was sold to the Japanese telecommunications holding SoftBank. A few months later, the Spot Mini robotic dog was born, on which you can install a manipulator arm. According to the head of Boston Dynamics, Mark Roberts, an important difference between the robops and the prototype was the reduced cost by 10 times. By the end of the year, it is planned to release about 100 Spot Mini, and by the middle of 2019 - to establish its mass production.
A few months later, the Spot Mini robotic dog was born, on which you can install a manipulator arm. According to the head of Boston Dynamics, Mark Roberts, an important difference between the robops and the prototype was the reduced cost by 10 times. By the end of the year, it is planned to release about 100 Spot Mini, and by the middle of 2019 - to establish its mass production.
Do robots dream of a stage
Igor Nikitin, CEO of the Corporation of Robots, told 360 that the difficulty of teaching robots to dance depends on how it is done. If direct programming is used, that is, a program of movements for specific music is put into the device, then this is a simple task that even a child can solve. In particular, this is what little visitors to the Robostation at VDNKh are doing. However, Boston Dynamics most likely used a more advanced option: artificial intelligence. That is, the robot had to learn to dance to any music, as people do. And this is a very difficult task.
“It is difficult to do without neural networks, and algorithms must include a learning system. The robot is taught some simple movements. He hears music and uses them. And then you need to turn on the evaluation mechanism so that it develops its skill. That is, introduce some kind of condition for him, for example, that the judges watch his dance and put marks. He receives them, and then he goes and comes up with new movements. But in this way you can teach him to move in such a way that our best dancers will envy, ”Nikitin explained.
The fourth industrial revolution is currently taking place. The main trend is the abandonment of robot programming for the sake of cognitive training programs. With the help of cameras, devices “look” at people, remember information and learn something. In the case of dances, they memorize and analyze movements, divide them into parts, and then use them. Moreover, any person, including a professional, can act as a teacher.
Moreover, any person, including a professional, can act as a teacher.
At the same time, Nikitin found it difficult to name the most difficult skill for a robot. For example, training in a driving school takes a person several months. And in addition to classes, you also need a long practice and memorization of the Rules of the Road. But from a mathematical point of view, the task is relatively simple. At the same time, learning some seemingly simple skills is quite problematic. So, I had to spend some time to teach one of the wards of the "Robostation" to pour tea for the guests.
“We also have Hug, a robot that hugs. Do you know how difficult it was to teach him this in such a way that he would not hurt anyone, that it was pleasant and not painful? It was difficult to train the registry office robot that marries people. That is, from such simple tasks for us, robots are lost. And those that seem difficult to us are often given to them very easily, ”concluded Nikitin.
That is, from such simple tasks for us, robots are lost. And those that seem difficult to us are often given to them very easily, ”concluded Nikitin.
Authors:
Anna Staritskaya
Development and programming of the dancing robot
- Authors
- Executives
- Job files
- Award documents
Krasovsky S.A. 1
1MAOU Secondary School No. 5, Pavlovo, Nizhny Novgorod Region
Voronina V.V. 1Gorshkova E.E. 2
1MBOU secondary school No. 7, Pavlovo, Nizhny Novgorod region
2MAOU secondary school No. 5, Pavlovo, Nizhny Novgorod region
The author of the work was awarded a diploma of the winner of the II degree0003
The text of the work is placed without images and formulas.
The full version of the work is available in the "Files of the work" tab in PDF format
Introduction
I love doing robotics. I have some knowledge of the Scratch programming language, which can be used to create computer games. In the second grade, I learned how to program a robot car that follows the program. But real robots move not only on wheels, and I wanted to make a robot that can walk like a person - with its feet.
I have some knowledge of the Scratch programming language, which can be used to create computer games. In the second grade, I learned how to program a robot car that follows the program. But real robots move not only on wheels, and I wanted to make a robot that can walk like a person - with its feet.
In a book about robots, I also read that in order to automatically control different parts of the robot, you need a special device - a controller. The controller is on a special board, it can be programmed, and the program will remain in memory.
I already had a board with a controller called Arduino. It was to her that I connected the motors that rotated the wheels of the machine, but how to make the robot walk with its feet? I learned that for such control, other motors are needed, which are called "Servomotors".
But in the book, the programs for robots were very complex, in a programming language that I did not know. And my grandmother told me that for the Arduino controller, you can try to compose programs in the language in which I already know how to program, but only there must be commands that the robot understands. Such a box with commands for the robot was in the Snap4Arduino program (Appendix 1).
And my grandmother told me that for the Arduino controller, you can try to compose programs in the language in which I already know how to program, but only there must be commands that the robot understands. Such a box with commands for the robot was in the Snap4Arduino program (Appendix 1).
Since the books about programming robots in Snap! no, so I had to figure out how to create programs for the robot myself, and my grandmother helped me.
Main body.
What is a robot. What are robots
Robots are used in various areas of our lives: they help to heal people and make cars, robots fly into space and go under water, work in the fields and build houses. There are also robots that help us in everyday life and entertain us. Such robots often look like people and animals and can really walk
But, if you connect an ordinary motor to the robot and attach wheels to it, then the robot will drive like an ordinary car.
But, if we want a robot that walks, then we do not need the elements on which the robot moves to constantly spin, like wheels - because our legs do not rotate. It turns out that special motors are needed to control the limbs. The motor that suits us is called a servo drive or a servomotor.
How the servomotor works
The servomotor, unlike a conventional motor, does not rotate constantly, but only rotates by an angle that we can change from the program. That is, we can control the position of the motor shaft. Servo drives are used to simulate various mechanical movements of robots.
Motor leads available in three colors:
brown or black - ground connection (gnd)
red - power supply (+5 volts)
orange yellow or white - control signal supply,
All pins are connected together and you only need to look carefully at the connector when connecting.
First, I learned how to control such a servomotor.
I connected the servomotor to the sixth pin of the controller and began to send signals to this pin and change the angle of rotation:
When you press the 1 key, the servomotor rotates quite a bit, when you press the 2 key, the servomotor turns at a right angle, when you press the Space key, the servomotor returns to its original state.
I also experimented by connecting this servomotor to other pins: sixth, seventh, eighth, ninth.
Programming four servomotors
I took four servomotors and connected them to the contacts with which I had already experimented. When you press the "Space" key, all servomotors rise to their original position.
I was given this kit for attaching servomotors.
And I assembled these servos in the form of robot legs.
And made a program for the robot to move the feet
or turned on the spot.
By repeating such pieces of the program in different combinations, you can make the robot dance. But it will be a very boring dance if there is no music.
So I had to get acquainted with the notes.
Melody programming
I learned that notes can be of different durations: whole, half, quarter-eighths and sixteenths. Notes are written on a special stave, from five lines, and on which line the note is written, its sound and name depend.
I figured out which note is played on which key of the keyboard and learned how to select simple songs on the computer.
In order to program the notes, I need the commands from the "Sounds" box
It turns out that when we select the command parameter to play a note, the same keyboard opens. I programmed a few songs, and most of all I liked about a small Christmas tree.
Here is the program I got:
Programming the dancing robot
To this music, I began to select the turns of the servomotors for the movement of the legs of the robot, and compiled such a program
First, the robot stands in its original position, then moves one foot, then the other, and then turns in place, and marches with both feet, each set of actions is repeated four times.
Robot body with 3D pen
But since the robot was dancing to a New Year's song, then with the help of a 3d pen I made a design that depicts a Christmas tree. (Annex 2)
(Annex 2)
How to program one LED.
Then I figured out how to program the LEDs. An LED is a device that emits light when an electric current flows through it.
An LED has two pins and will emit light when current flows from plus to minus.
In order for the LED not to burn out, another electronic component must be connected to the circuit - a resistor.
First, I connected one LED to the controller. The controller has many legs and I connected the plus LED to the Arduino D13 pin, minus the LED I connected to the Ground pin. I made this program:
According to this program, first a signal goes to the 13th contact of the controller, for one second, at this time the LED is on, after a second the signal goes low and the LED goes out for one second. And the flashing will repeat ten times. I changed the time in the “Wait” command: for example, if you set the time to 3 seconds, then the LED will blink much more slowly so that the lights blink to the beat of the music, I set the pause time in the final program to 0.5 seconds.
And the flashing will repeat ten times. I changed the time in the “Wait” command: for example, if you set the time to 3 seconds, then the LED will blink much more slowly so that the lights blink to the beat of the music, I set the pause time in the final program to 0.5 seconds.
How to program a string of LEDs. Running Lights
Then I connected and compiled a program for two LEDs. I connected the LEDs to pins 13 and 10 of the Arduino.
First program for two LEDs
Two LEDs on pins 10 and 13 flash simultaneously.
Then I changed the program:
Two LEDs began to blink in turn - when one shines, the second is dark and vice versa. The program will repeat until we give the command to stop the program.
Then I added two more LEDs, placed the LEDs on the breadboard
and changed the program like this:
When I start the program, the LED on the 10th leg of the controller lights up, after half a second it goes out, and the LED on the 11th leg lights up, and shines for half a second, then it goes out, and the LED on the 12th leg will light up, and after 0. 5 seconds on 13th, and so it will continue forever. To turn off all the LEDs, I press the spacebar - this is shown by the second part of the program, where a low signal goes to all the legs and the garland turns off, and the servos return to their original position.
5 seconds on 13th, and so it will continue forever. To turn off all the LEDs, I press the spacebar - this is shown by the second part of the program, where a low signal goes to all the legs and the garland turns off, and the servos return to their original position.
Conclusion: I saw that my LEDs worked just like a garland with running lights, and I placed the LEDs on the Christmas tree.
Conclusion
So I built and programmed in the Snap environment a robot that can dance.
I programmed the music for it and made the case in the form of a Christmas tree and decorated it with multi-colored lights that blink according to the program.
Now I want to make a robot that will perform other more complex tasks: it will not only dance, but also walk with its feet, and I will also make a floating robot.
Literature
I.Voronin, V.Voronina "From the basics to the creation of robots." Peter. 2018
A.Nikolaeva, V.Natanson, L.Roshchina "Piano game" Moscow Music 1991
Meet the Robots! http://umki-dist.ru/course/view.php?id=16
What is a 3d pen and why is it needed? https://vk.com/@abspla3d-chto-takoe-3d-pen-i-zachem-ona-nuzhna
3D Lamp - Christmas Tree http://3d-lampy.ru/index.php?route=product/product&product_id=82
Appendix 1 Snap!
Snap! is an object-oriented programming environment where you can get acquainted with the basics of algorithmization and programming, learn how to create animations and computer games, take the first steps in programming mechanisms and robotic devices.